



منو
کنترلر موتور بازوی روبات
قیمت:
---
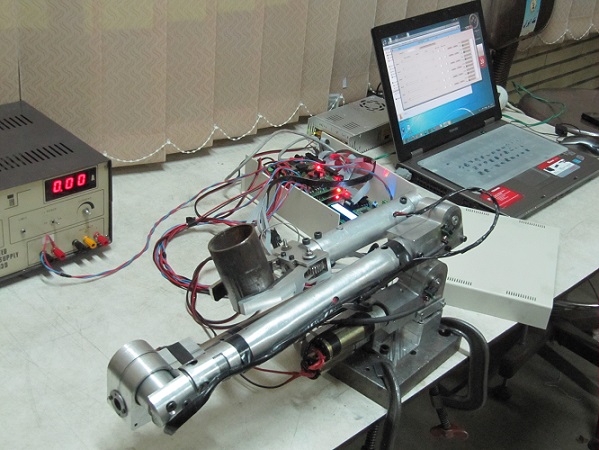
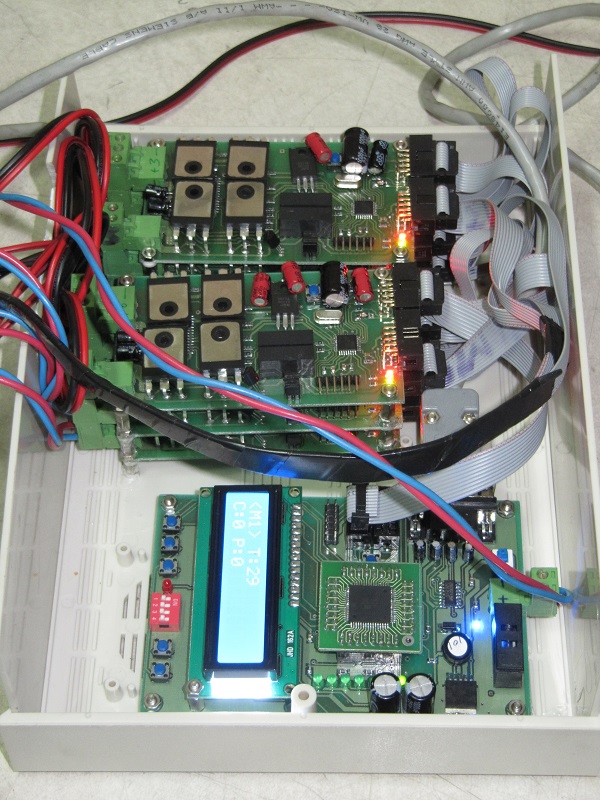
مجموعه کنترل موتور بازوی روبات 6 درجه آزادی با 6 بورد درایور موتور، یک بورد اصلی و برنامه کنترلی تحت #C طراحی و ساخته شده است
+
سبد خرید
#نظرات
شما اولین نفری باشید که نظر می دهید.
 چرخ دستی باربری
اسکنر سهبعدی و نرمافزار تحلیلگر بدن
همزن مغناطیسی
جاروی صنعتی پیشرانهای (موتوردار)
جاروهای صنعتی دستی
چاپگر 3 بعدی
دستگاه آزمایش مرکز فشار
دستگاه آزمایش تعادل اجسام شناور
دستگاه میز هیدرولیکی (وزنی/حجمی)
دستگاه آزمایش تلفات سیستم لولهکشی
دستگاه آزمایش پمپهای سری و موازی
دستگاه آزمایش کانال روباز
کنترلر موتور پلهای
درایور موتور DC
ماسفت سوییچ شیلد Arduino
بورد داده برداری
رابط ماژول HMTR به USB
پاور بانک صنعتی
بورد مبدل DC به DC
بورد مبدل مثبت به منفی
چرخ دستی باربری
اسکنر سهبعدی و نرمافزار تحلیلگر بدن
همزن مغناطیسی
جاروی صنعتی پیشرانهای (موتوردار)
جاروهای صنعتی دستی
چاپگر 3 بعدی
دستگاه آزمایش مرکز فشار
دستگاه آزمایش تعادل اجسام شناور
دستگاه میز هیدرولیکی (وزنی/حجمی)
دستگاه آزمایش تلفات سیستم لولهکشی
دستگاه آزمایش پمپهای سری و موازی
دستگاه آزمایش کانال روباز
کنترلر موتور پلهای
درایور موتور DC
ماسفت سوییچ شیلد Arduino
بورد داده برداری
رابط ماژول HMTR به USB
پاور بانک صنعتی
بورد مبدل DC به DC
بورد مبدل مثبت به منفی



 info@guilazma.com
info@guilazma.com
 0939 721 0611
0939 721 0611